关于安尔法
无线遥控技术在铲运车上的应用
Alpha矿业智能化 2020-03-12

1
无线遥控铲运车的工作状况
在巷道生产过程中,由于长期的采掘及采矿工艺的特殊性,采矿条件变得越来越复杂,每个进路崩落的矿石在铲运车铲、出的过程中不断地滑落到铲矿区,因此很多出矿进路形成了大块和悬拱,使得驾驶员在铲出矿过程中,形成安全隐患。另外,采空区域内的矿石,由于安全问题,常规做法是放弃不采,造成资源的浪费。经过多方面的论证,借助国家、公司智能化、绿色矿山发展规划,以信息化、自动化和智能化带动传统矿业的转型升级,打造“安全、绿色、智能、高效”矿山发展目标,遥控铲运车则是矿山机械化向自动化、智能化发展的第一步。
2
铲运车遥控技术发展趋势
第一阶段 :视距遥控。一般操作距离为 50m~100m, 不需要布设网络一次性投资成本低。优点 :使用安全、易于操作和维护,能降低劳动强度。缺点 :很大程度上依赖于操作员的判断力、操作技术和经验,不能很好的判断铲运车铲装情况,生产效率低,设备运行状态无法实时反馈。
第二阶段 :视频遥控。在50m~100m 的范围采用视频传输方式对设备进行操作,不需要布设网络性价比高。优点 :通过摄像头和监视器画面实现远距离操控,便于携带, 人远离危险区安全有保障,显示屏可实时反馈设备的运行状态。缺点 :对井下环境要求比较高,操作人员仍是采场周围操控设备,灰尘大、视线不良。
第三阶段 :远程智能遥控。在井下搭建网络通信系统, 基于自主行驶技术与远程遥控技术的结合,将井下环境、设备状态传输地表中控室,操作人员根据监控画面实时进行远程操作,彻底改变操作环境及操作方式。
3
原理及实施
无线遥控技术是对被控制对象进行远距离控制的技术。原理是发射机把控制的电信号先编码, 然后转换成无线电波发送出去,接收机收到载有信息的无线电波接收,放大,解码,得到原先的控制电信号,这个电信号再进行功率放大用来驱动相关的电气元件,实现无线的遥控。
WIFI 是一种可以将个人电脑、手持设备(如PAD、手机)等终端以无线方式互相连接的技术, 通过无线电波来联网,是当今使用最广的一种无线网络传输技术。实际上就是把有线网络信号转换成无线信号,使用无线路由器供支持其技术的相关电脑,手机,平板等接收。WIFI 信号传输速度非常快,不需要布线,符合个人和社会信息化的需求。
我公司的遥控铲运车施工流程如下 :
① 第一阶段和第二阶段实施基本原理相同,不通点在于第一阶段数据传输使用数传模式,第二阶段遥控数据传输采用数传和图传同步传输,原理如下:
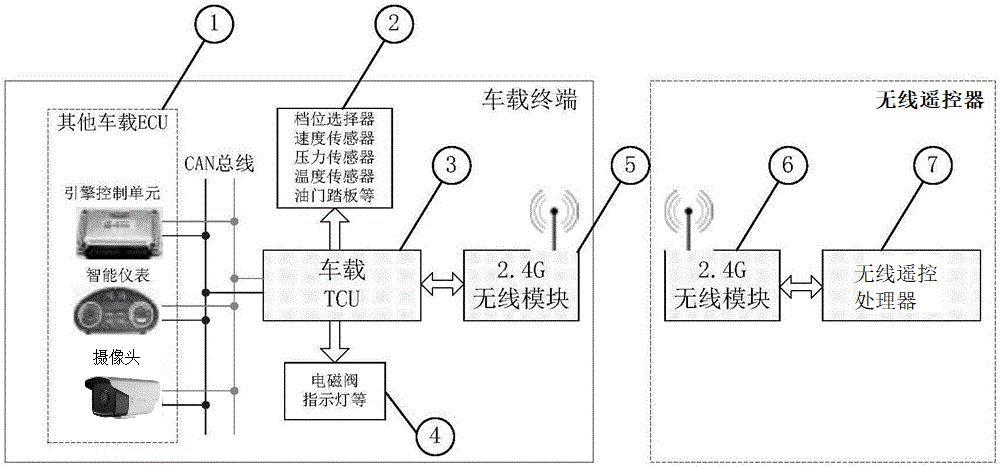
铲运车无线遥控系统分为无线收发器和遥控器两部分,通过带功放的2.4G点对点无线传输模块进行远程通讯,实现对铲运车现场数据采集及运行动作控制、远程实时监控、状态显示、参数设置、记录保存以及深层次后端数据处理;无线收发器通过CAN通讯读取铲运车数据包括:监测参数传感器(2)、车载TCU(3)、功率输出(4)、2.4G带功放的点对点传出模块(5)以及发动机ECU(1);遥控器部分包括2.4G无线接入模块(6)、遥控器处理器(7);安装在铲运车上的参数检测传感器(2)测取铲运车运行状态数据,经过信号调理后送至车载TCU(3),车载TCU(3)根据速度传感器、压力传感器、档位选择器、油门踏板传感器及发动机控制单元传送过来的相关数据,调用相应的自动换档策略,驱动相关的换档电磁阀及2.4G带功放的点对点传出模块(5);同时,通过无线收发器带功放的2.4G点对点传输模块(5)及遥控器的2.4G传输模块(6),实现车载终端与遥控器的无线通讯。
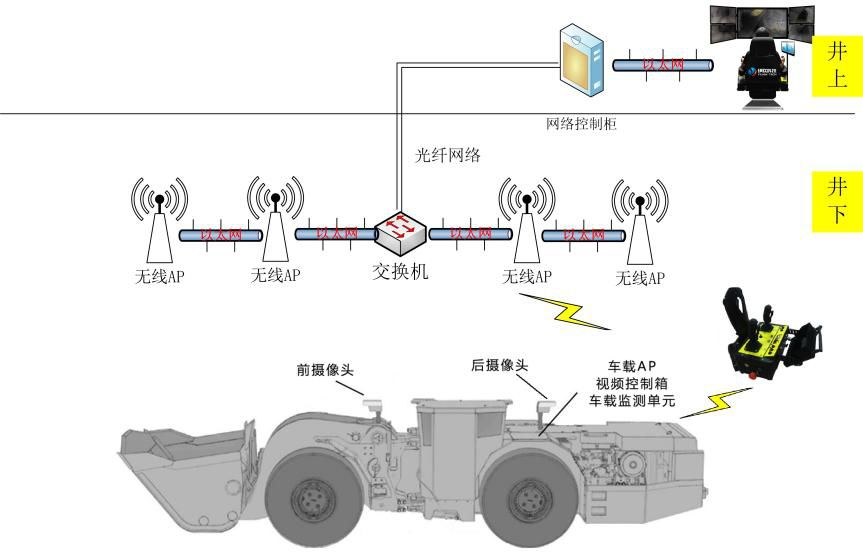
① 第三阶段采用WiFi无线网络配合无线电遥控操作技术应用于铲运车以实现远距离无线操作,也可以在遥控模式下,驾驶员在远离铲运车的安全区域,通过无线遥控手柄单元控制铲运车的各种动作。在生产效率上有了很大的提高,也在很大程度上保障了驾驶员的健康及生命安全。具体原理如下:
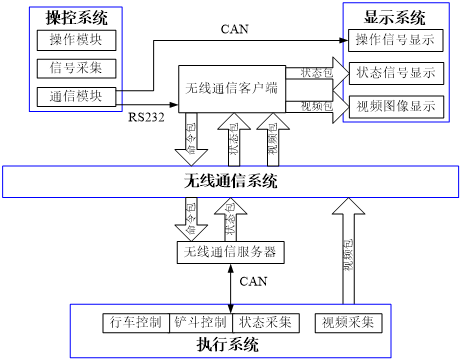

显示系统框架图
整个显示系统设计遵循人机工效学的原则,采取模块化的设计方法,整个系统可以分为操作数据显示模块、状态数据显示模块以及视频数据显示模块。整个系统框架如上图所示。操作显示模块的数据来自控制器,控制器采集操作机构的动作之后,将其经过处理通过CAN总线发送给液晶显示屏,从而为操作者显示指令信号;视频显示模块包括前后铲运车视频显示,通过自带WIFI的摄像头拍摄铲运车周围的场景,并通过无线局域网返回上位机,在上位机解码显示,为操作者提供真实的驾驶操作感;状态显示模块中车载终端接收各传感器采集到的铲运车状态参数,然后通过自带的WIFI将数据发送到上位机,更新上位机界面的参数,以便操作者了解铲运车的运行状态。
在该操控台上搭建操控系统和监控系统。通过操作台上的手柄等操作机构可以远程控制铲运车的行驶和动作,操作员对操作台上的各个旋钮、按钮以及手柄等进行必要的操作,这种操作动作经控制器编译后发送给上位机,再通过无线网络对铲运车的启动、变速、转向、油门及刹车进行遥控,使其按要求的速度和路线行驶,从而实现对铲运车的远程遥控和监控。同时,铲运车将前后路况的实时图像和运行参数视频信号通过无线网络实时传输到安装在操作台上的上位机显示屏上,使驾驶员可以实时远程掌握铲运车的真实驾驶环境,从而监控铲运车的运行情况,这样,铲运车、遥控驾驶员以及遥控操控台(遥控操纵平台、无线路由、摄像机、控制系统等)就构成一个闭环控制系统。
远程遥控系统特征
1) 保留之前手动驾驶的所有功能,不改变原车的操作习惯和功能;
2) 同时具有遥控功能,可以使用遥控器进行远距离的控制,具体可操控的基本功能如下:
a. 遥控系统远程操控的范围不受距离限制;
b. 控制动臂的升臂和降臂,同时动作的速度可控;
c. 控制铲斗的装料和卸料,同时动作的速度可控;
d. 控制斗杆油缸伸缩,同时动作的速度可控;
e. 控制前进、后退、左转、右转,同时动作的速度可控;
f. 控制回转,同时动作的速度可控;
g. 控制发动机的启动和停止;
h. 控制前灯和后灯的开关;
i. 控制喇叭的开关;
j. 有4路视频监控图像,分别监控铲运车的前后左右四个方向的情形。
4 结 语
通过对计算机技术、无线网络与无线遥控技术的综合应用,从本质上提升井下人员的出矿安全,降低劳动强度,大大缓解生产压力,效果显著。同时我公司正在推进智能化矿山建设,遥控铲运技术是大势所趋,现我公司制造的遥控铲运车将为公司推行远程遥控铲运车总结经验,向机械化到自动化过渡再到智能化发展迈出重要的一步。

邓有林 中级机械工程师
主要负责机械设备的具体研发工作,具有10年以上的设备设计及制造经验。加入Alpha之前,在矿山设备领域,具有3年以上的选煤设备及井下矿石铲装运设备的设计与研发;在煤电烟气处理环保领域,从事FGD吸收塔内设备技术支持近5年,精通除雾器、脱硫喷嘴及烟气均布器等设备的设计选型;熟悉水射流技术,曾独立设计用于军用装备测试的淋雨试验箱(GJB150.8A-2009)和用于水泥回转窑的富氧燃烧系统等。

李幸福 自动化工程师
机械工程自动化专业,拥有10多年机械电控方面经验。现为Alpha自动化工程师,曾参与科研院校海量发电无模成型等国家大型科研项目。

荆一堃 国际项目协调员
拥有多次国际项目市场协调与国际营销经验。正式加入Alpha后担任国际项目协调员,参与巴西、菲律宾、香港等项目的执行,现主要负责菲律宾项目传感器业务的执行工作。
特别害怕万一你需要却找不到我们!


电话:+86-28-83311885









如有疑问或想了解更多,请咨询:028-83311885
-
关于我们
-
IIoT应用案例
-
产品&服务
-
业务合作
- 联系电话:15756877473 (赖经理) 联系电话:18282103350 (陈经理) 联系电话:15927439651 (王经理) QQ交流 :1490063359 (赖经理) QQ交流 :1184531314 (陈经理) QQ交流 :2676439348 (王经理) 合作邮箱:info@alpha1888.com
关注我们
-
了解行业最新资讯
 扫码关注微信
扫码关注微信