关于安尔法
- 惊爆,传感器直降!
- 实施预测性维护时的分析注意事项
- AI引领矿业新纪元,勘探开发迎来智慧革命
- 完美交付 | 蒙古国可汗矿业200万吨炼焦煤重介质选煤厂调试完毕!
- 【连载3】人工智能解惑进阶|伯克利AI课程
- 俄罗斯采矿业的全球影响力与未来展望
- 共创全球矿业新篇章:安尔法加入中国选冶出海联盟!
- 【连载2】人工智能解惑进阶|伯克利AI课程
- [连载1]人工智能解惑进阶|伯克利AI课程
- 携手千年波斯 | 中国煤机制造挺进中亚!
- 倒计时4天!|2024俄罗斯新库兹涅茨克国际矿业展览会即将开幕!
- 展会预告|ALPHA与您相约2024俄罗斯新库兹涅茨克国际矿业展览会!
- 百团大战 | XRT预抛废(干选)的竞争现状
- 冠军球队的秘密
- 它来了它来了!安尔法重磅推出锂电池系列传感器,为新能源汽车发展赋能!
- 安尔法助力井工煤矿提升设备智能运维和生产安全!
- 3分钱!F35战斗机同水平预测性维护和设备智能运维云服务!
- 2022年度中国名校四川校友足球赛 | 安尔法携手千页科技、拜安科技赞助中国矿业大学校友队!
- 数字感知新未来 | 安尔法“算法定义硬件”产品线!
- 运维大数据的价值!安尔法智能托管运营做深矿山服务!
- 行业喜讯 | 安尔法设备预测性维护系统入编《选煤厂智能化技术与装备推荐目录》!
- 安尔法与首都国投的结晶|年产60万片工业物联网硬件工厂开始试生产!
- 2022开年大单 | 安尔法喜获蒙古国戈壁资源公司煤泥水系统智能运维及运营长期合同
- 分布式光纤测温系统在叙永选煤厂安装完毕,数据成功接入!
- 喜讯 | Alpha再次引领前沿技术,微震预警入选中国工程院发布的《全球工程前沿2021》!
- 砥砺前行迈进新征程 | 安尔法智控股改及北交所上市签约仪式圆满完成!
- Alpha提供矿山设备智能化硬件升级和免费数据处理平台
- 安尔法诚聘董事会秘书
- 智能化暴风眼丨持续性诊断需求
- 没有中枢神经的工业物联网就是“植物人”
- 量身定制!基于光纤分布式测温技术的皮带传动设备的PHM系统!
- 矿业实现智能化转型的4座大山
- Alpha(安尔法)获得成都市高新技术企业专项补贴!
- Alpha智能物联采选系统分析服务
- 安尔法携手中科芯未来落地海南琼海!
- 没有几十万行代码,你还敢做大数据?
- 双喜临门!基于物联网的传感器项目完成签约,落地山东济宁与海南琼海
- 求贤若渴!安尔法招聘:液压、电气及机械工程师
- 求贤若渴!安尔法招聘:液压、电气及机械工程师
- 今日头条|Alpha为拉法基旗下水泥厂提供预测性维护服务!
- 喜报!你要悄悄申请“发明专利”,然后惊艳所有人!
- 近乎白给的双11特惠!超低费为各大选煤厂已有传感数据接入分析诊断服务!
- 效果显著!PdM系统攀煤选煤厂稀介泵油箱预警
- 地下矿山实施防碰撞系统的三大挑战
- 无线遥控技术在铲运车上的应用
- 止损280万!PdM系统攀煤选煤厂又一次成功预警
- 芯片就绪-安尔法新一代智能传感器!
- 谁是2020年硬核创新之最?最有潜力的28家成长企业或将揭晓
- ALPHA为浩特定制矿山智能管理运维系统
- ALPHA招募经销商或代理商
- 疫情防控|安尔法热成像测温筑牢疫情防控第一道防线
- 抗击疫情,武汉加油!疫情下的安尔法预测性维护如何持续发挥奇效?
- 人才紧缺!招聘!安尔法!国际大公司!
- Alpha到访巴西淡水河谷 | 新一轮技术培训指导
- 安尔法选煤智能化技术在德里绽放 | 印度国际选煤展
- 最快能有多快?智能预测性维护系统成功监测到复选泵严重故障
- 准备好了吗?安尔法即将以智能化闪耀印度国际选煤大会(附智能化资料)
- 创举丨全球首个5G+智能化选煤厂示范项目揭幕
- Alpha阶段性工作汇报!(最近安尔法都在忙什么?)
- 重磅消息 | 信息系统集成及服务资质认定取消啦!
- 欢迎大家莅临2019北京煤炭展 | China Coal& Mining Expo
- 香港客户来访|遥控技术交流与深度传感器合作
- Alpha机器学习时间进入”亿小时”阶段 | 2年增长1040倍
- 巴西淡水河谷客户来访|实地考察与进一步合作
- 智能遥控案例|井下采矿设备的智能遥控等级
- ALPHA受邀《马钢矿业资源集团智能矿山规划设计方案》评审会!
- 淡水河谷!安尔法在南美巴西的20000+测点预测性维护部署
- [免费赠阅]最新缅甸矿业投资指南暨少数赞助商招募
- 矿业智能化的十个超级创新公司
- 进军东南亚-安尔法预测性维护在知名半导体行业公司厂区设备的应用
- 安尔法预测性维护成功进入南美咯!巴西
- “低成本”预测性维护让选厂智能化“触手可及”
- 安尔法预测性维护传感器获本安防爆认证
- 插播现场一条叙永选煤厂现场新闻,PdM预测到电机的一个小问题?儿童节开始的特惠预维套装了解一下?
- 菲律宾采矿业概况
- 智能迷你堆取料机-Alpha智能装备
- Alpha气动阀门在蒙古国UHG选煤厂成功应用并完美替代欧美产品
- 安尔法预测性维护全新月收费模式-开启行业最底价,还赠送3个试用名额,要试试吗?
- Alpha闪耀汉诺威工业展
- 人工智能项目的六投三不投(转)
- 预测性维护是最佳的维护方式-振动仪监测和在线传感监测的区别
- 预测性维护成效持续显现-石窑店选煤厂刮板机提前排障
- 西安煤博会-安尔法受邀宣讲选煤厂智能化预测性维护
- 亲测有效-安尔法成功预测到叙永选煤厂设备故障并提前排障!
- 工业物联网应用场景丰富,“设备运维”是的切入点
- 石窑店选煤厂预警系统由泰戈特监督验收
- 安尓法智控在山西焦煤的选煤厂智能化演讲交流
- 预测性维护在西南地区选煤厂第一个试点!
- 一文读懂工业物联网的矿业智能化应用
- 无线智能故障预警系统在石窑店选煤厂调试成功
- 风电领域设备预测性维护
- 预测性维护给矿山带来的变革
智能遥控案例|井下采矿设备的智能遥控等级
原创: Alpha矿业智能化 2019-09-25

你真的了解井下采矿设备的智能遥控不同等级吗?复杂的煤矿井采智能遥控案例了解一下?
从视距遥控到自主操控,大致分4个级别,如下
① 视距遥控(视频)

视距遥控作业现场
② 远程遥控
地下采矿车辆集成到矿山网络,有网络覆盖的区域均可以实现遥控。操作人员可在矿井里固定或移动操作站,或在地面集控运营中心内控制采矿设备。生产时,地下采矿车辆都是由人工远程操控完成,没有自动化的功能。一般情况,采矿车辆可以2档行驶(主要为避免与巷道碰撞)。生产效率比手控低。

远程遥控作业现场
③ 半自主操控
1个操作员可以在井下或地面控制中心内,同时操控3台采矿车辆。采矿设备运输、卸料实现自动化,装料人工远程操控。生产效率高,采矿车辆可以2档行驶(主要为避免与巷道碰撞),车辆待工时间短,生产时间长。

半自助操控作业
④ 自主操控
1个操作员可以在井下或地面控制中心内,同时操控3~6台采矿车辆。全过程不需要人工干预,车辆基本靠自主运行。操作人员只需“监督”车辆运行即可。
目前,仅少数国际知名的矿山装备公司实现了该技术的商业化。包括:安百拓、山特维克等公司。
值得一提的是,Alpha(安尔法)的智能铲运车(LHD)即将推出,这将是中国首台自主操控的地下铲运车。不仅如此智能铲运机还通过内置传感技术,将铲运机的整机运行参数上传到Alpha 云端做智能预测性维护,保障高效长久的运行。

自主操控的工作方式

自主操控+预测性维护系统

超视距远程操作
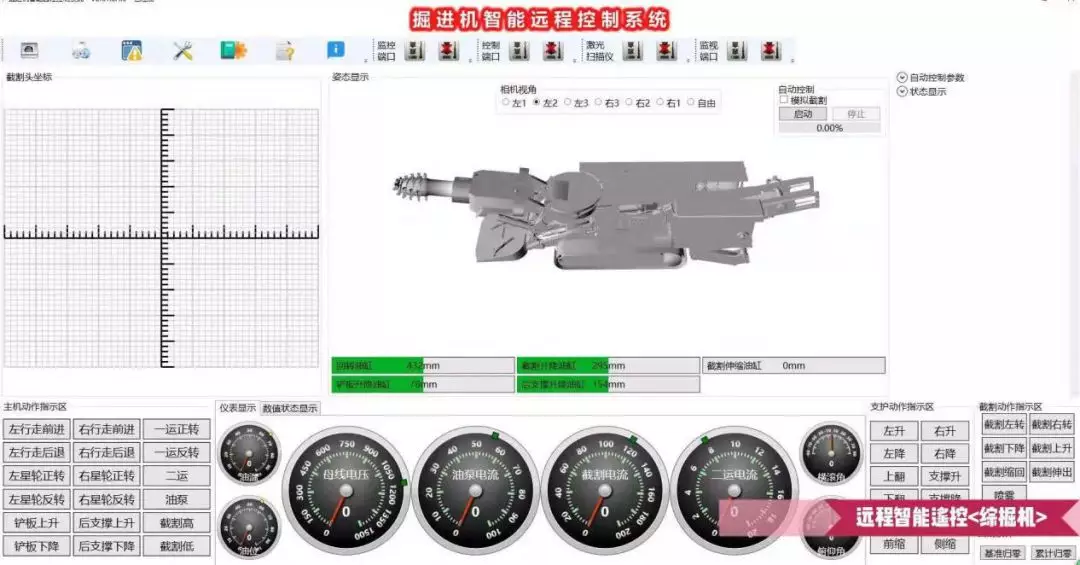
系统控制界面
巷道的安全我们同样能够做到更完美的监测,微震监测系统!
通过传感器的布设,数据的分析,微震监测在煤矿和非煤矿上的领域中都大有作为,提前预知危险,超前判断,提升井下作业安全。

微震监测在地下非煤矿山:岩爆,岩体坠落,断层滑移,突水等问题
......................
微震监测在煤矿:顶板表面变形,顶板塌陷,瓦斯突出,突水等问题
......................
当然,我们还需要更多智能化的基础!数字化矿山基础!
要实现自主操控,必须首先构建数字化矿山。在推进采矿业智能化的过程中,不要忽略数字化是实现智能化的基础,智能化不能一蹴而就。
井下矿山车辆实现自动驾驶,需要建立高精度井下三维数字模拟系统,并构建电子围栏。基于此,井下矿卡,铲运车等设备可实现无人驾驶。
建立井下三维数字系统的方式主要有两种,一种依靠传统手持扫描仪,而最新的一种则是依靠无人机的自主飞行。
无人机井下扫描作业现场
SLAM(同时定位与地图构建)是一款用于提升地下采矿操作安全性的内部软件。

我们独创的 SLAM系统能够引导一架无人机从一个地点到达另一地点而无需使用手动操作,同时它还能在不使用GPS、探照灯以及任何其它装置的条件下对未探索区域进行测绘。
而且不仅仅在地下矿山,露天同样适用!
SLAM 系统拥有自主飞行的功能,因此 SLAM 系统的操作人员无需为了操控无人机而去学习一些特殊技能。
采矿是一个非常古老的产业,物联网、大数据、云计算、边缘计算、深度学习等新技术正给全球采矿业带来一场前所未有的革命。Alpha(安尔法)致力于为资源业提供领先的采选技术,除自主研发外,也与世界知名的矿业技术提供商合作,为采矿和选矿提供成套的智能化解决方案。
矿业智能化发展从上世纪90年代已起步,芬兰、加拿大、瑞典等国家为取得在采矿领域的竞争优势,先后制定了“智能化矿山”和“无人化矿山”的发展规划;美国开展了对地下煤矿的自动定位与导航技术研究,获得了商业化的研究成果;2016年我国发布了《全国矿产资源规划(2016—2020年)》,明确提出未来5年要大力推进矿业领域科技创新,加快建设数字化、智能化、信息化、自动化矿山。
采矿智能化前沿技术,请联系我们!
特别害怕万一你需要却找不到我们!


李生才
kyle.lee@alpha-technology.com.au
微信:Kyle977895349
杨博
benjamin.yang@alpha-technology.com.au
微信:yb89yy92









如有疑问或想了解更多,请咨询:028-83311885
-
关于我们
-
IIoT应用案例
-
产品&服务
-
业务合作
- 联系电话:15756877473 (赖经理) 联系电话:18282103350 (陈经理) 联系电话:15927439651 (王经理) QQ交流 :1490063359 (赖经理) QQ交流 :1184531314 (陈经理) QQ交流 :2676439348 (王经理) 合作邮箱:info@alpha1888.com
关注我们
-
了解行业最新资讯
 扫码关注微信
扫码关注微信